Selected projects from our AUTOMATION AND STRUCTURES projects portfolio:
{kind=link}
{kind=link}
{kind=link}
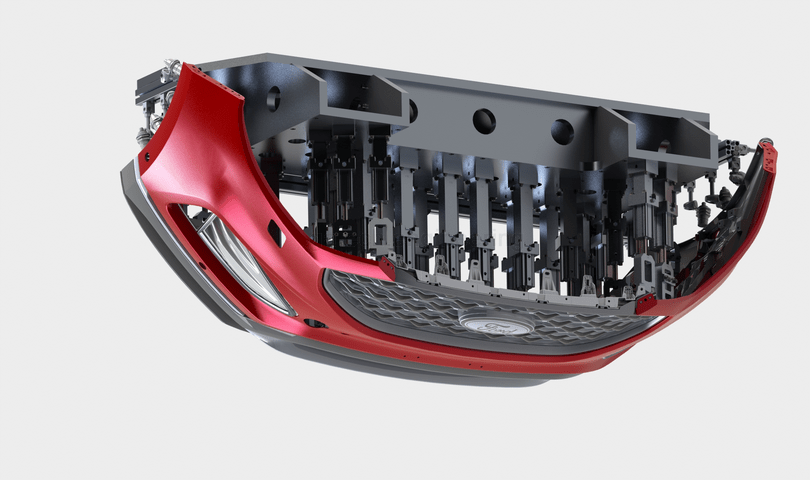
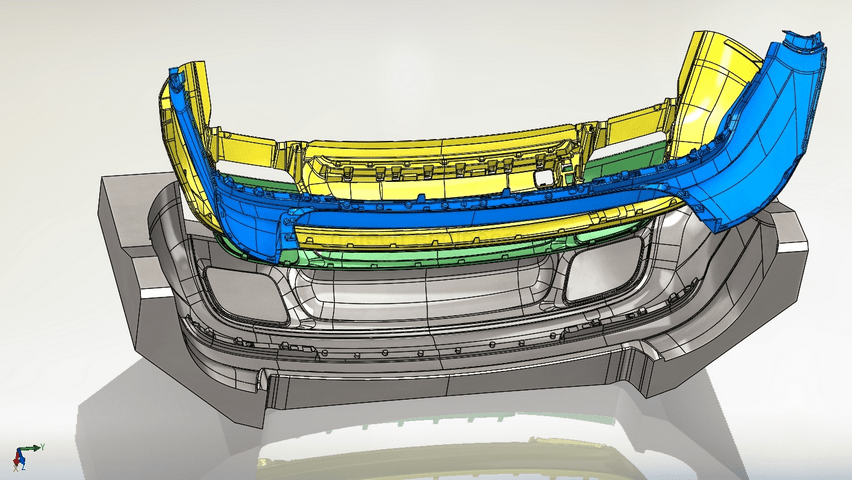
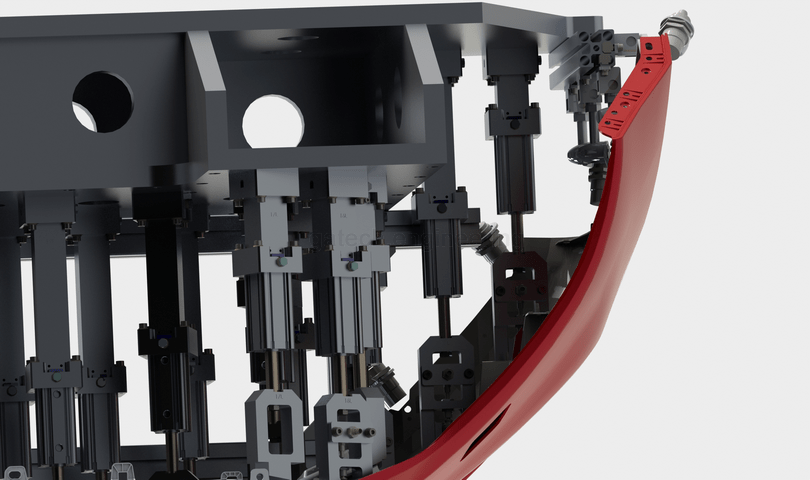
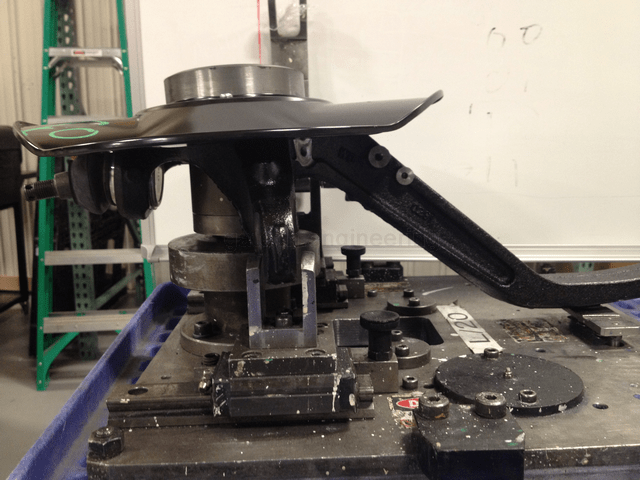
PROJECT: NEST TOOL FOR ASSEMBLING OF FORD BUMPER
Characteristics:
To prepare a car bumper, a holding nest was needed to be designed to hold the bumper while other bumper preparation processes take place, such as adding a front mask, adding additional lights related components, and other masks. There are openings in the bumper nest for vacuum suctions with a diameter of 45-60mm, to hold the bumper during bumper manipulation. Additional space was also planned in the nest to enable the small bumper deformation (0.2-0.4mm) for snap mechanism to lock the part above or under it after being pushed from the machine tooling. On the upper part, there is an additional positioning sensor and other sensors for the bumper inserts for every snap part. These are needed for later fixing the bumper on the vehicle.
Customer: Ford, USA
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
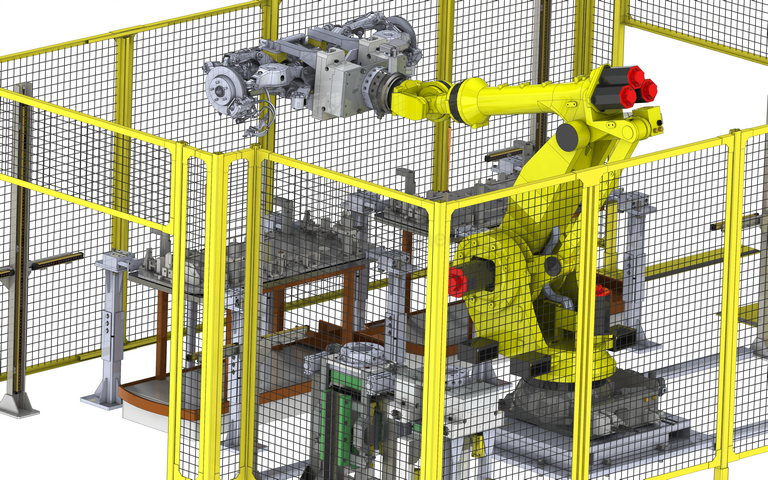
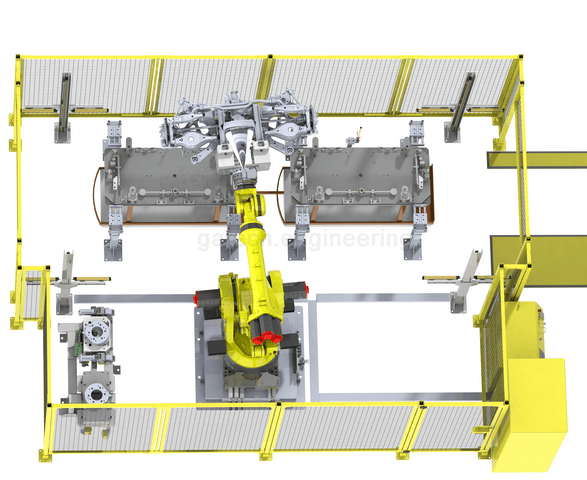
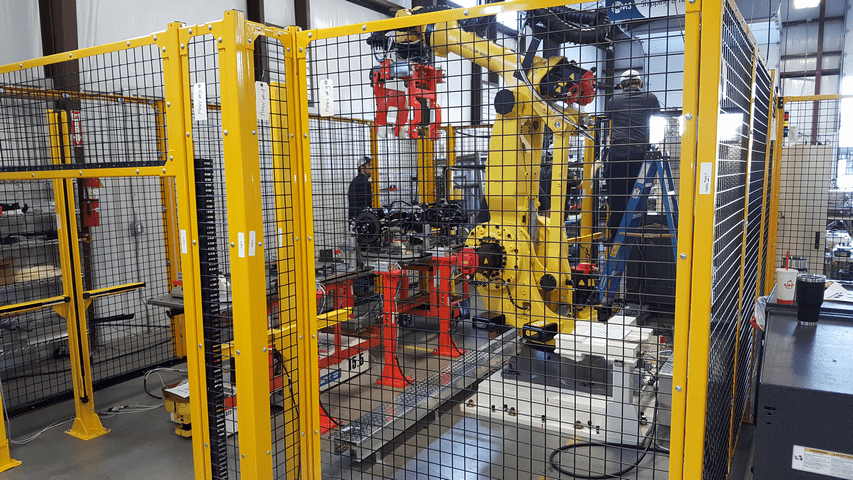
PROJECT: ROBOTIC CELL FOR ROTATING AND POSITIONING OF THE BACK AXLE OF NISSAN ALTIMA
Characteristics: Design of a robotic cell for rotating and positioning the back axle of Nissan Altima. The project included: – Designing the fence for the industrial robot cell – Using the customer’s specification to plan the robot basis – Utilizing sensors to detect new pallet entry, as well as processed pallet exit – Robotic arm with a pneumatic gripper – Construction of a gripper attachment – Construction of plastic pads for the back axle – Planning sensors and camera positioning – Planning synchronized and complex movement of 2 robotic arms for processing of different back axle types – Creating 2D schematics, bill of materials and explode view to ease the final installation and montage of the robot cell
Customer: Nissan, USA
{kind=link}
{kind=link}
{kind=link}
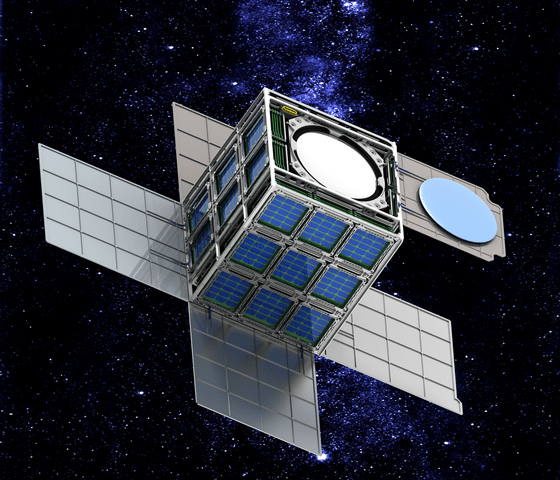
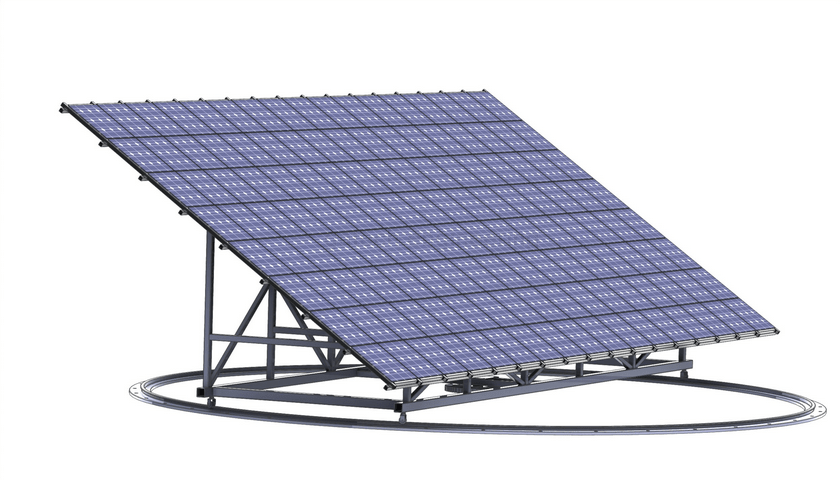
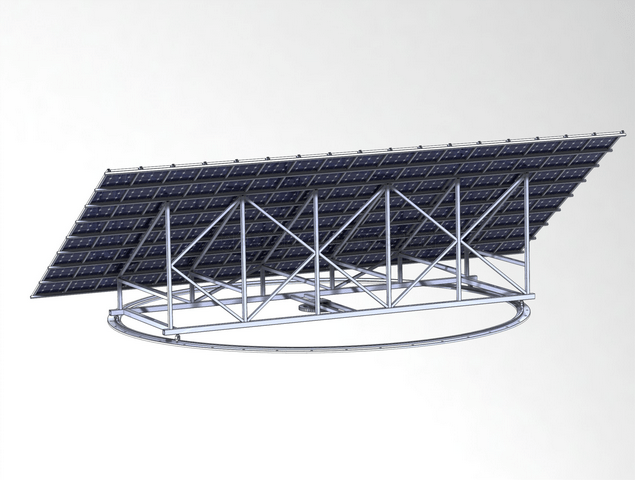
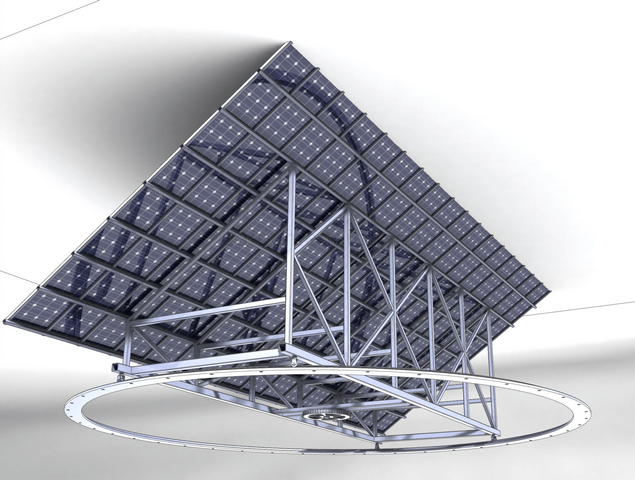
PROJECT: MOVABLE CARRIER CONSTRUCTION FOR SOLAR PANELS
Characteristics: The client requested a movable carrier for solar panels with an area of 50m2, which was designed. This offers a lightweight construction set on rails to rotate, offering maximum solar panel efficiency. The rotation is completed through a 7kW motor and 1/8 transmission set in the center of the construction.
Customer: N/A
{kind=link}
{kind=link}
{kind=link}
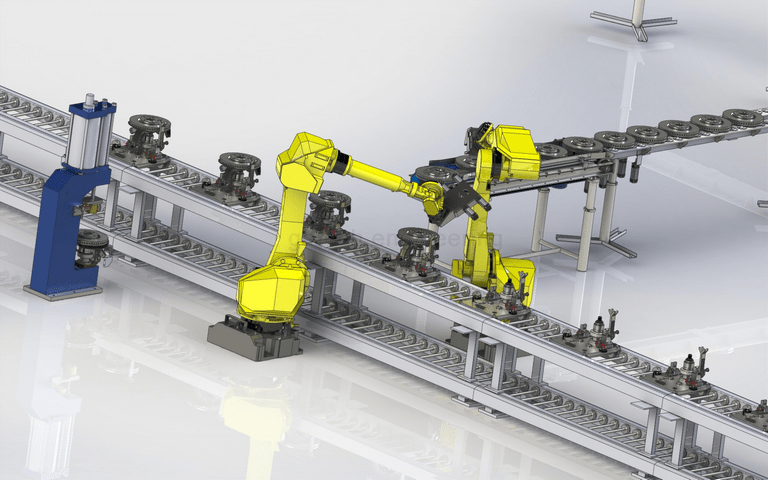
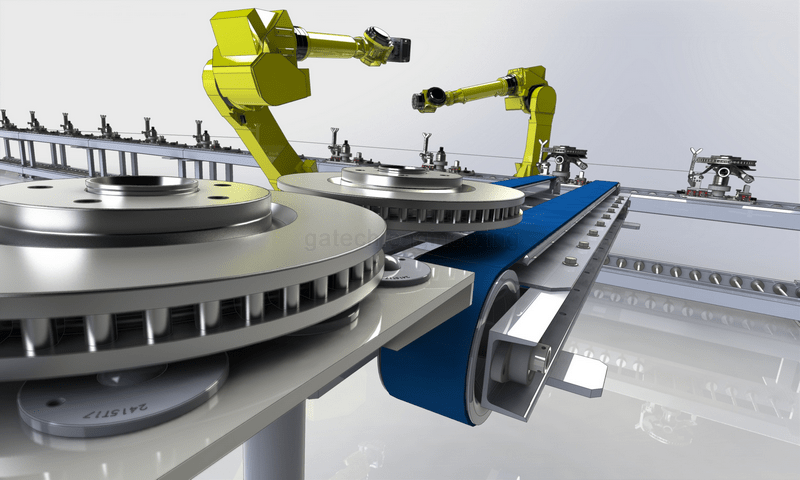
PROJECT: ASSEMBLY LINE FOR MOUNTING OF BRAKE DISKS ON THE KNUCKLE
Characteristics: Designing part of the assembly line for mounting brake disks on the knuckle. The design included a transport line, arm part of the robot for fetching brake disks, pneumatic manipulator of the brake disks, press tooling, and guiding and self-centering. Additionally, a layer for the displacement line and 2d schematics of all designed parts were also created. The old and error-prone system for supplying brake disks was redesigned. Furthermore, a cone-like pneumatic fetcher was created, successfully fetching even wrongly positioned brake disks on the supply line.
Customer: Sytech, USA
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
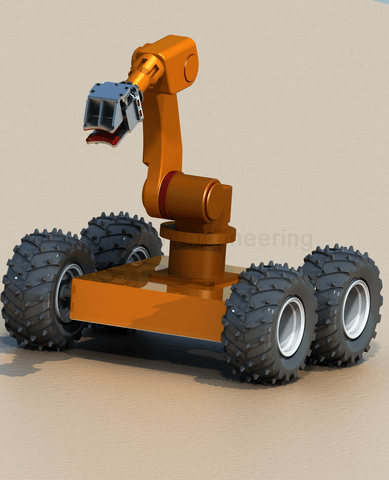
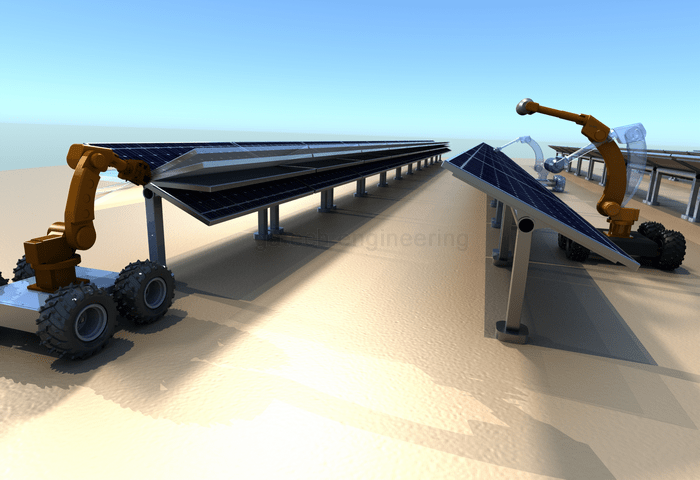
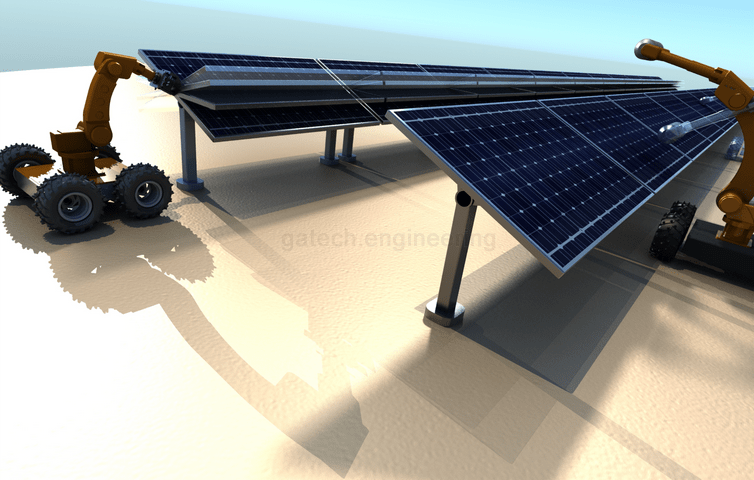
PROJECT: MOBILE ROBOTS FOR MAINTAINING OF A SOLAR FARM
Characteristics: A design for a solar farm was made using mobile robots for: – Cleaning solar panels – Changing solar panels’ angles The idea? Use autonomous mobile robots to clean the dusted solar panels in the desert, as well as tilt them towards the sun to increase efficiency. The plan was to operate autonomous robots for 14 days and recharge the energy created by the solar panels.
Customer: N/A
and many other projects …